Assignment
6α_Το ρομπότ είναι "φυλακισμένο"
6α_Το ρομπότ είναι "φυλακισμένο"
Completion requirements
View
Make a submission
Receive a grade
Opened: Tuesday, 7 February 2023, 8:00 AM
Due: Tuesday, 11 April 2023, 8:00 AM
Διδακτικοί στόχοι
Στο τέλος της δραστηριότητας θα είστε σε θέση να:
- χρησιμοποιείτε επαναληπτική δομή ελέγχου
- έχετε μια πρώτη επαφή με τους αισθητήρες εδάφους
Το ρομπότ είναι φυλακισμένο
ΠΡΟΕΤΟΙΜΑΣΙΑ ΤΟΥ ΠΕΡΙΒΑΛΛΟΝΤΟΣ ΕΡΓΑΣΙΩΝ- Κατά την εγκατάσταση έχουν δημιουργηθεί τρία (3) εικονίδια στην Επιφάνεια εργασίας, τα οποία αντιστοιχούν στον φάκελο Coppelia_Scenes, στο FossBot Simulator και CoppeliaSim Edu.
- Κατεβάζετε το αρχείο fossbot_empty_zikzak3_prison.ttt στον υπολογιστή σας και το αντιγράφετε στον φάκελο Coppelia_Scenes.
Βρίσκετε το αρχείο σας στο Πόροι - Πηγές στο τέλος της ενότητας. -
Ανοίγετε τον φάκελο Coppelia_Scenes και από εκεί διπλοπατάτε
στο fossbot_empty_zikzak3_prison.ttt. Έτσι ανοίγει με το Coppelia η συγκεκριμένη σκηνή.
- Επιλέγετε Start/ resume simulation. Αν θέλετε να βλέπετε και το παράθυρο της προσομοίωσης και το προγραμματιστικό περιβάλλον ταυτόχρονα μπορείτε να επιλέξετε σε Επαναφορά ώστε να υπάρχει χώρος στην οθόνη σας για να βλέπετε και το προγραμματιστικό περιβάλλον.
(Εάν δεν σας ενδιαφέρει να βλέπετε ταυτόχρονα το πρόγραμμα και την προσομοίωση, μπορείτε να έχετε τα δύο περιβάλλοντα σε πλήρη οθόνη).
ΠΑΡΑΤΗΡΗΣΗ: Εάν δεν έχετε πατήσει το Start/ resume simulation τότε ΔΕΝ θα μπορέσει να "τρέξει" η προσομοίωση του ρομπότ κι ενώ θα το έχετε θέσει, για παράδειγμα, να κινηθεί, αυτό δεν θα ανταποκρίνεται. - Από την Επιφάνεια Εργασίας διπλοπατάτε στο FossBot Simulator. Έτσι ανοίγει και το προγραμματιστικό περιβάλλον (σε μια καρτέλα του περιηγητή που χρησιμοποιείτε - συνιστάται έντονα να ανοίγετε το FossBot Simulator με το Chrome).
- Εισέρχεστε στο Διαχειριστικό περιβάλλον κι ελέγχετε ώστε ο η Στροφή 90 μοίρες να έχει τιμή 3.

ΤΟ ΣΕΝΑΡΙΟ ΤΟΥ ΠΡΟΓΡΑΜΜΑΤΟΣ:
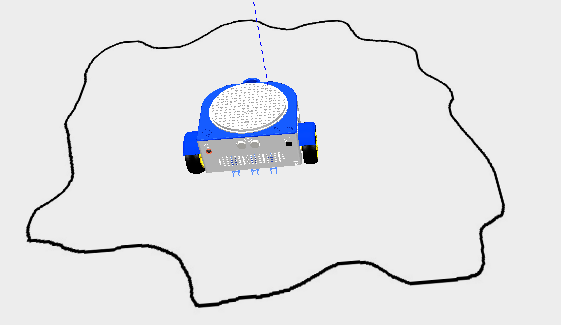
Το ρομπότ μας είναι "φυλακισμένο" μέσα σε ένα μαύρο πλαίσιο. Συγκεκριμένα, μέχρι που το ρομπότ συναντήσει ένα εμπόδιο, προχωράει μπροστά μέχρι που ο μεσαίος αισθητήρας (εδάφους) ανιχνεύσει μαύρη γραμμή. Κατόπιν, προχωράει προς τα πίσω 20 εκατοστά και κάνει στροφή δεξιά 30 μοίρες.
ΥΠΟΜΝΗΣΗ:
Η στροφή 30 μοιρών θα εκτελεστεί παρότι θα θέσετε στο πρόγραμμα την εντολή Στρίψε δεξιά 90 μοίρες γιατί θα έχετε πραγματοποιήσει την αλλαγή στο Διαχειριστικό περιβάλλον.
ΥΛΟΠΟΙΗΣΗ:
- Επιλέγετε το εικονίδιο της δημιουργίας καινούργιου προγράμματος
 .
.
- Πληκτρολογείτε για όνομα του καινούριου πρότζεκτ: ρομπότ φυλακισμένο κι επιλέγετε Εντάξει.
- Πληκτρολογείτε για την περιγραφή του προγράμματος: αισθητήρας εδάφους1 κι επιλέγετε Εντάξει.
- Δημιουργείτε το πρόγραμμα:
ΠΑΡΑΤΗΡΗΣΕΙΣ:
Α) Το ενδιαφέρον είναι να επανατοποθετείτε το ρομπότ σε διάφορες θέσεις ώστε να ελέγχετε τη συμπεριφορά του. - Επιλέξτε Αποθήκευση για να αποθηκευτεί το πρόγραμμά σας.
Παραδοτέο
- Στιγμιότυπο οθόνης (Αρχείο)
- Έγγραφο (Αρχείο)
- URL (Κείμενο)
- Πρόταση - Λέξη (Κείμενο)
- Δημοσίευση σε Forum
Αποθηκεύστε το αρχείο. Για να βαθμολογηθείτε γι αυτή τη δραστηριότητα στείλετε το αρχείο σας.