Page
Σύντομη παρουσίαση
Σύντομη παρουσίαση
Completion requirements
Παρουσίαση Fossbot
- Το κύριο σώμα του ρομπότ μπορεί να εκτυπωθεί με 3D εκτύπωση.
- Στο μπροστινό μέρος του ρομπότ υπάρχει RGB LED, αισθητήρα υπερήχων Ultrasonic (ο οποίος μετρά απόσταση) και έναν αισθητήρα Photoresistor (ο οποίος, ανάμεσα στα άλλα, χρησιμοποιείται
για την ανίχνευση του φωτός περιβάλλοντος).

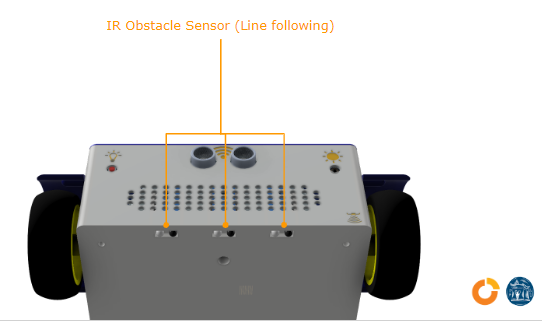
- Στο κάτω μέρος του ρομπότ υπάρχουν αισθητήρες IR Obstacle Sensor (ο οποίοι είναι κατάλληλοι για να ακολουθεί το ρομπότ μια μαύρη γραμμή).
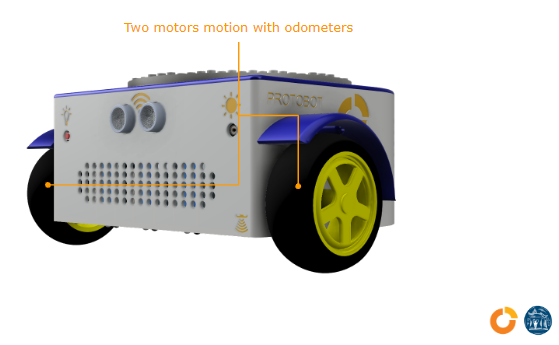
- Στα πλαϊνά μέρη του ρομπότ βρίσκονται οι κινητήρες (ένας σε κάθε μεριά) και odometres (οι οποίοι μετρούν την απόσταση που έχει διανύσει το ρομπότ).
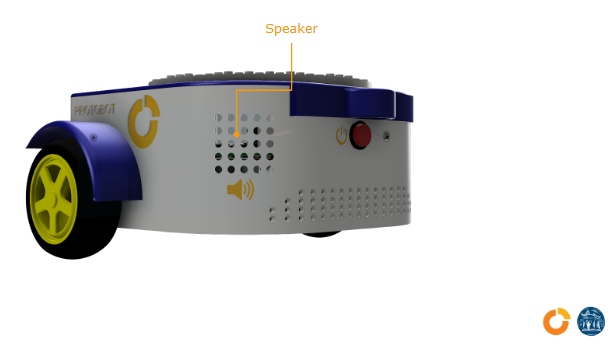
- Στο πλαϊνό μέρος του ρομπότ υπάρχουν Speakers (ηχεία) για να ακούγονται ήχοι.
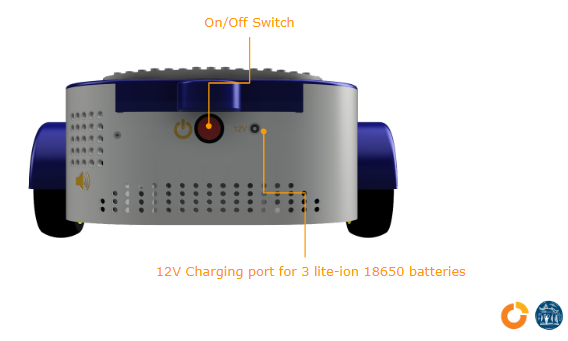
- Στο πίσω μέρος του ρομπότ βρίσκεται ο διακόπτης On/Off Switch (για το άνοιγμα και το κλείσιμο του ρομπότ) και η θύρα για τη φόρτιση της μπαταρίας.
- Στο επάνω μέρος του ρομπότ υπάρχει μία βάση η οποία εύκολα αφαιρείται κι όπου μπορούν να τοποθετηθούν τουβλάκια Lego. Επίσης, υπάρχει στο πίσω μέρος και μία λαβή στην οποία μπορούν να προσδεθούν άλλες κατασκευές.

- Επίσης, στο επάνω μέρος του ρομπότ υπάρχει IR remote control receiver (για την επικοινωνία του ρομπότ) και μία τρύπα στην οποία μπορεί να τοποθετηθεί ένα μολύβι για να καταγράφει γραμμές στην επιφάνεια στην οποία κινείται το ρομπότ.

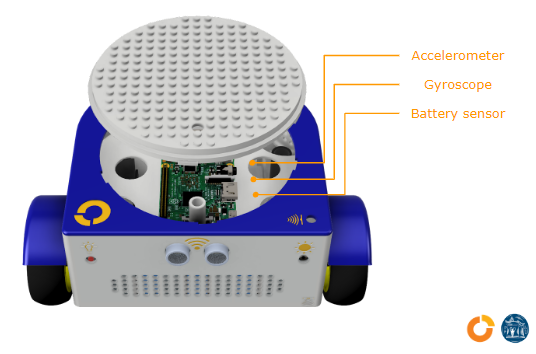
Το ρομπότ διαθέτει Accelerometer (επιταχυνσιόμετρο) το οποίο μετρά δυνάμεις επιτάχυνσης. Αυτές οι δυνάμεις μπορεί να είναι
στατικές, όπως είναι η επιτάχυνση της βαρύτητας, ή δυναμικές όταν
προκαλούνται – προέρχονται από αλλαγές στην ταχύτητα ή στη διεύθυνση
της κίνησης (επιταχύνσεις, επιβραδύνσεις, στροφές). Επίσης, το ρομπότ διαθέτει Gyroscope (Γυροσκόπιο) το οποίο μπορεί να ανιχνεύσει κινήσεις ή στροφές της συσκευής. Επίσης, διατίθεται και Battery sensor.
ΠΑΡΑΤΗΡΗΣΗ:
Οι ορισμοί των αισθητήρων, οι αρχές λειτουργίας τους και πώς αυτοί συμβάλλουν στη λειτουργία του ρομπότ θα παρουσιασθούν αναλυτικά σε επόμενα μαθήματα μέσω δραστηριοτήτων.
Last modified: Tuesday, 13 December 2022, 11:06 PM