Fossbot - Για το Δημοτικό και τις πρώτες τάξεις του Γυμνασίου
Weekly outline
-
Εκπαιδευτική Ρομποτική στο Δημοτικό - Fossbot
Eπιμορφωτικό σεμινάριο για εκπαιδευτικούς όλων των ειδικοτήτων με συνδυασμό ασύγχρονης και σύγχρονης εξ αποστάσεως εκπαίδευσης για την Παιδαγωγική αξιοποίηση της Εκπαιδευτικής Ρομποτικής με το Fossbot στην υλοποίηση δραστηριοτήτων και την ενσωμάτωσή τους στη διδασκαλία μαθημάτων.
ΣυντονιστήςΝίκος Τζιμόπουλος, Καθηγητής Πληροφορικής ΠΕ86
Συγγραφή και διαμόρφωση επιμορφωτικού υλικού
Μαρία Ιωσηφίδου, Καθηγήτρια Πληροφορικής ΠΕ86Διάρκεια
Δώδεκα (12) εβδομάδων
-
Forum
-
-
-
Page
-
Page
-
Page
-
AssignmentView
-
View Start discussions: 1 Receive a grade
-
View
-
View Start discussions: 1 Receive a grade
-
-

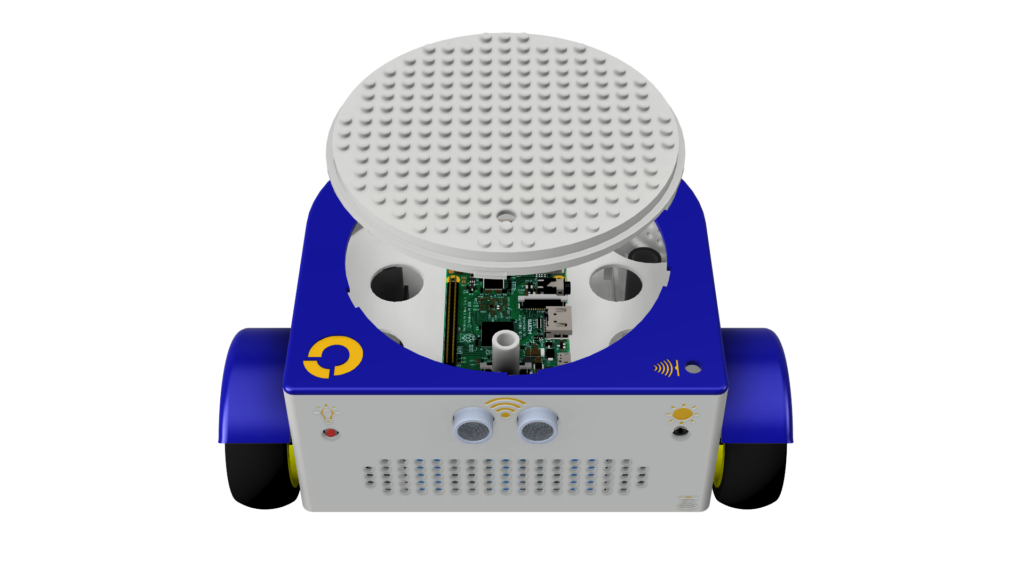
Το Fossbot είναι ένα ελκυστικό προγραμματιζόμενο ρομπότ για μικρά παιδιά αλλά και για μεγαλύτερα ανάλογα με το προγραμματιστικό περιβάλλον που θα χρησιμοποιηθεί και την πολυπλοκότητα των ενεργειών που θα καλεστεί το ρομπότ να εκτελέσει. Είναι ένας εύκολος τρόπος εισαγωγής του προγραμματισμού στην τάξη, για παιδιά ηλικίας από τριών ετών. Με το Fossbot θα είστε σε θέση να προγραμματίσετε και να πραγματοποιήσετε πολλά σχέδια δράσης.
-
Page
-
View Make a submission Receive a grade
-
AssignmentView Make a submission Receive a grade
-
-
-
Page
-
AssignmentView Make a submission Receive a grade
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
Page
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
AssignmentView Make a submission Receive a grade
-
AssignmentView Make a submission Receive a grade
-
AssignmentView Make a submission Receive a grade
-
AssignmentView Make a submission Receive a grade
-
-
-
Page
-
AssignmentView Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
View Make a submission Receive a grade
-
-
-
Page
-
View Make a submission Receive a grade
-
View Make a submission Receive a grade
-
-
-
Page
-
View Make a submission Receive a grade
-
-
-
Page
-
AssignmentView Make a submission Receive a grade
-
-
Συγχαρητήρια!
Φτάσατε στο τέλος της εκπαιδευτικής διαδρομής.
Τελευταία δραστηριότητα, η συμπλήρωση του ερωτηματολογίου τελικής αξιολόγησης του σεμιναρίου.
Θα ακολουθήσουν ανακοινώσεις για την έκδοση της βεβαίωσης παρακολούθησης.
Σας ευχαριστούμε